|
Mainland High School
Lord of the Trash Rings: ISTF 09-2004 |
||||||||||
|
Home
Introduction Contest Components One Two  Product Product
Three Background Environmentalism History of Plastics Marine Laws Plastic Properties Pollution Laws Research Groups The Oceans Waste Management Project Assessment Team |
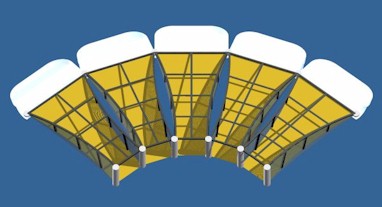
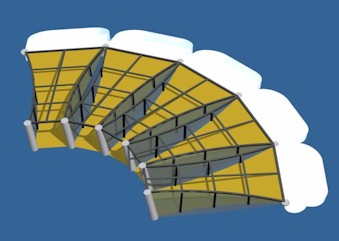
Our product is a stationary - yet portable - array of artificial harbors made of
porous plastic that can be strategically placed to passively collect floating plastic
and other debris carried by the ocean's currents.
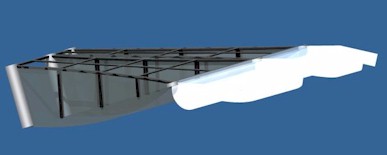
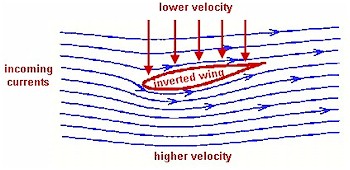
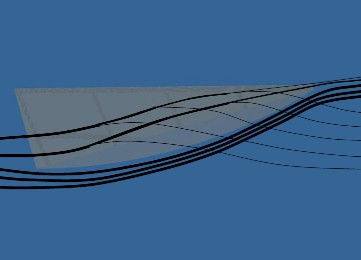
We noticed in our research that debris is collected naturally when it washes up on shorelines. Correspondingly, our harbors are designed with a tapered bottom surface to mimic a natural beachhead. 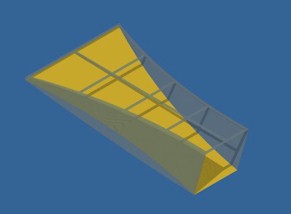 Ocean currents would flow through our harbors carrying the floating debris into our collection bag - the white bag in the diagram. The harbor will need to have its collection bags removed and replaced on a regular basis. This will be accomplished by shipping boats that, ideally, will make stops at the various harbors along their shipping paths. Maintenance ships would be ready to depart when called upon to go from harbor to harbor on the advisement of the collection ships. From there, the collection bags would make their journey to a plasma-gasification plant where they and their contents would be broken down into useable materials. 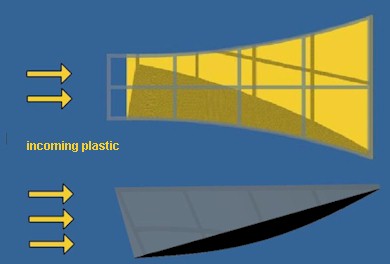 If we consider our harbor to be a closed system, then the continuity equation tells us that the volume flow rate is constant within the harbor. We have designed our artificial harbor to have a constant cross-sectional area, allowing the velocity of the ocean water passing through the harbor to remain relatively constant and, hopefully, not producing any dramatic fluctuations in dynamic pressures. The inner floor of our harbor would rise linearly, beginning at a large rectangular opening and ending in a wider, shorter opening. This will concentrate the plastic into a dense area near the surface of the water, facilitating the collection of the otherwise widespread plastic. 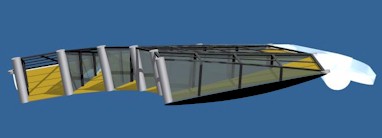 The bottom of the harbor would be an inverted airfoil (highlighted in black above) which, due to the hydrodynamic effects of the flow on the foil, would create a net downward force on the harbor. This force is compensated for by a series of buoys which keep our harbor snug to the waters surface. The low velocity flow area of the foil along the inner bottom surface of our harbor will carry the plastic to the water surface and collection bag. This is in accordance with Bernoullis equation which states that, in a fluid system, areas of low velocity flow experience higher pressure.
To ward approaching ships in the dark, there would be an array of lights placed on each corner of the harbor. Two GPS units on each end of each harbor would illustrate the orientation of the wing in respect to the current. This would allow for the collection of valuable information on the flow of ocean currents; furthermore, if a wing detaches from its tether and begins to drift to sea it would be easily traceable and then dealt with quickly. On top of the harbor, there would be a solar cell system which angles itself directly at the sun. These cells would power the warning lights and GPS. 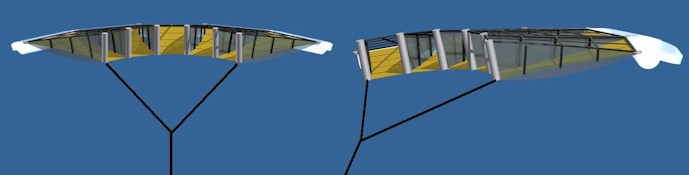 Our product would be anchored to the bottom of the sea floor with cables. This fastening will vary depending on the depth of where it is being placed. The line will be connected at the two leading corners of the harbor, and would then meet at a central point from where it plunges down to the sea floor. Along the underside of each harbor is a fin which, in conjunction with the swiveling mooring lines, allows the harbor to align itself to the current without putting strain on the system. 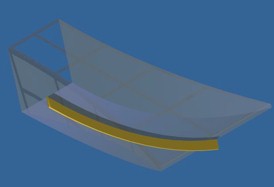 Ironically, our harbor would be constructed out of porous plastic. Because the harbor would be made of plastic, it would not be reactive with the sea water and would endure the turbulence of the ocean. The porocity of the plastic helps dissipate any back pressure due to the height change of the water and plastic deposits that do not move along the wing. Furthermore, the porosity of our foil would be variable. Whereas the leading edge of the foil would not be porous, the porosity of the foil would increase as water flows further up our harbor, allowing more and more water to flow through our foil. This allows the deposited plastic to continuously flow up the slope towards the collection bag. Our harbors will have an initial underwater depth of 5 meters and a cross-sectional area of 50 square meters. Keeping a constant cross-sectional area, they would taper over a distance of 40 meters to a top opening with a height of 1 meter and a length of 50 meters (our calculations). In an e-mail dated Febuary 8th, 2010, Norton Smith stated:
"First, the depth in the gyre is up to 18,000 feet. Secondly the currents in the
center of the gyre consist of a series of eddies and as such are inconsistent and
may not be a good place to put a device like yours. to get a good sense of the currents,
go to http://usuablewww.oscar.noaa.gov
I have considered an anchored device in the past and would place it toward the NW
Hawaiian Islands where the depths are not so great and there is consistent current."
To achieve maximum efficiency with a harbor system, it is imperative to select the
best locations in which to place an array of harbors. Several factors should be
accounted for when making this decision. For one, the amount of plastic a harbor
can collect is directly proportional to the speed of the current at that location.
The
Kuroshio Current off the coast of Japan is where the gyre currents are at their
fastest, and where a harbor is likely to collect more plastic. However, because
the protection of natural habitats is such an important aspect of this project,
an array of harbors would be established near the fragile habitats surrounding the
Hawaiian
archipelago and Baja, California. To best prevent plastic from seeping past
our harbors the number of arrays in a given location would be proportional to the
width of the current at that location. Placing the harbors near but not in common
shipping lanes would facilitate the maintenance that would have to be occasionally
done.
"While it would not hurt to begin collecting at a depth, I did a few trawls at a 2 meter depth and found less that 10% of the plastic that we collected in the surface trawls which covered the top 15 cm ." Each array placed in the Kuroshio Current could collect an average of 63 tons of plastic per year. Elsewhere within the gyre, where the currents approximate 0.4 m/sec, our harbors could collect up to 14 tons of plastic per year (not accounting for the variable abundance of plastic in the ocean). (our calculations) The overall effect of our harbor can be likened to a stream of water flowing through a tilted window screen. As the water strikes the screen, a small amount escapes into the water behind the stream while the rest flows parallel to the screen. This small stream pushes the plastic particles which are too large to escape through the screen up the slope until they arrive at the collection bag. During one of our meetings, we tested a screen model. A video of our results is linked below.
Current Station Locations and Ranges
http://tidesandcurrents.noaa.gov/currents09/tab2pc1.html Hawaii Archipelago: Protected Species http://www.wpcouncil.org/hawaii-protectedspecies.html Islands and Protected Areas of the Gulf of California, Mexico http://www.eoearth.org/article/Islands_and_Protected_Areas_of_the_Gulf_of_California%2C_Mexico |
|||||||||